select
select 는 여러 채널 상태를 동시에 모니터링할 수 있는 구조로, 문법은 switch 와 유사합니다.
import (
"context"
"log/slog"
"os"
"os/signal"
"time"
)
func main() {
finished := make(chan struct{})
ctx, stop := signal.NotifyContext(context.Background(), os.Kill, os.Interrupt)
defer stop()
slog.Info("running")
go func() {
time.Sleep(time.Second * 2)
finished <- struct{}{}
}()
select {
case <-ctx.Done():
slog.Info("shutting down")
case <-finished:
slog.Info("finished")
}
}이 코드는 context, 채널, select 세 가지를 결합하여 프로그램이 원활하게 종료되는 간단한 로직을 구현합니다. 코드에서 select 는 ctx.Done과 finished 두 채널을 동시에 모니터링하며, 종료 조건은 두 가지입니다. 첫째는 운영체제가 종료 신호를 보내는 것이고, 둘째는 finished 채널에서 읽을 메시지가 있는 경우, 즉 사용자 코드 작업이 완료된 경우입니다. 이를 통해 프로그램 종료 시 정리 작업을 수행할 수 있습니다.
select 는 두 가지 매우 중요한 특성을 가지고 있습니다. 첫째는 논블록으로, 채널 송수신 소스 코드에서 select 에 대한 일부 처리를 볼 수 있으며, 논블록 상태에서 채널 사용 가능 여부를 판단할 수 있습니다. 둘째는 무작위화로, 사용 가능한 채널이 여러 개 있으면 무작위로 하나를 선택하여 실행합니다. 정해진 순서를 따르지 않으면 각 채널이 상대적으로 공정하게 실행될 수 있으며, 그렇지 않으면 극단적인 상황에서 일부 채널은 영원히 처리되지 않을 수 있습니다. select 의 작업은 모두 채널과 관련되므로, 먼저 chan 문서를 읽은 후 select 를 이해하는 것이 좋습니다.
구조
런타임에는 runtime.scase 구조체 하나만 있어 select 의 분기를 나타내며, 각 case의 런타임 표현는 scase입니다.
type scase struct {
c *hchan // chan
elem unsafe.Pointer // data element
}여기서 c는 채널을 의미하고, elem은 수신 또는 송신 요소의 포인터입니다. 실제로 select 키워드는 runtime.selectgo 함수를 의미합니다.
원리
select 의 사용 방식은 go 가 네 가지 경우로 나누어 최적화하며, 이는 cmd/compile/internal/walk.walkSelectCases 함수에서 이 네 가지 경우의 처리 로직을 볼 수 있습니다.
func walkSelectCases(cases []*ir.CommClause) []ir.Node {
ncas := len(cases)
sellineno := base.Pos
// optimization: zero-case select
if ncas == 0 {
return []ir.Node{mkcallstmt("block")}
}
// optimization: one-case select: single op.
if ncas == 1 {
...
}
// optimization: two-case select but one is default: single non-blocking op.
if ncas == 2 && dflt != nil {
...
}
...
return init
}최적화
컴파일러는 앞의 세 가지 경우에 대해 최적화를 수행합니다. 첫 번째 경우는 case 수가 0 일 때, 즉 빈 select 입니다. 빈 select 문은 현재 고루틴이 영구적으로 블록되도록 만듭니다.
select{}블록되는 이유는 컴파일러가 이를 runtime.block 함수의 직접 호출로 변환하기 때문입니다.
func block() {
gopark(nil, nil, waitReasonSelectNoCases, traceBlockForever, 1) // forever
}block 함수는 runtime.gopark 함수를 호출하여 현재 고루틴을 _Gwaitting 상태로 만들고 영구 블록에 들어가 다시는 스케줄링되지 않도록 합니다.
두 번째 경우는 case 가 하나이고 default 가 아닌 경우입니다. 이 경우 컴파일러는 이를 채널의 송수신 작업으로 직접 변환하며, 블록 방식입니다. 예를 들어 다음 코드와 같습니다.
func main() {
ch := make(chan int)
select {
case <-ch:
// do something
}
}이는 runtime.chanrecv1 함수의 직접 호출로 변환됩니다. 어셈블리 코드에서 확인할 수 있습니다.
TEXT main.main(SB), ABIInternal, $2
...
LEAQ type:chan int(SB), AX
XORL BX, BX
PCDATA $1, $0
CALL runtime.makechan(SB)
XORL BX, BX
NOP
CALL runtime.chanrecv1(SB)
ADDQ $16, SP
POPQ BP
...case 가 하나인 경우 채널에 데이터를 보내는 것도 같은 원리로, runtime.chansend1 함수의 직접 호출로 변환되며 역시 블록 방식입니다.
세 번째 경우는 case 가 두 개이고 그중 하나가 default 인 경우입니다.
func main() {
ch := make(chan int)
select {
case ch <- 1:
// do something
default:
// do something
}
}이 경우 runtime.selectnbsend 호출에 대한 if 문으로 변환됩니다.
if selectnbsend(ch, 1) {
// do something
} else {
// do something
}채널 데이터를 수신하는 경우 runtime.selectnbrecv 호출로 변환됩니다.
ch := make(chan int)
select {
case x, ok := <-ch:
// do something
default:
// do something
}if selected, ok = selectnbrecv(&v, c); selected {
// do something
} else {
// do something
}주의할 점은 이 경우 채널 수신 또는 송신이 논블록 방식이라는 것입니다. block 매개변수가 false인 것을 명확하게 볼 수 있습니다.
func selectnbsend(c *hchan, elem unsafe.Pointer) (selected bool) {
return chansend(c, elem, false, getcallerpc())
}
func selectnbrecv(elem unsafe.Pointer, c *hchan) (selected, received bool) {
return chanrecv(c, elem, false)
}채널 데이터 송수신 모두 block이 false일 때 잠금 없이도 송신 또는 수신 가능한지 판단할 수 있는 빠른 경로가 있습니다.
func chanrecv(c *hchan, ep unsafe.Pointer, block bool) (selected, received bool) {
if !block && empty(c) {
if atomic.Load(&c.closed) == 0 {
return
}
return true, false
}
...
}
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
if !block && c.closed == 0 && full(c) {
return false
}
...
}채널 읽기 시 채널이 비어 있으면 직접 반환하고, 채널 쓰기 시 채널이 닫히지 않고 이미 가득 차 있으면 직접 반환합니다. 일반적인 경우 이들은 고루틴 블록을 유발하지만 select 와 결합하여 사용하면 그렇지 않습니다.
처리
위의 세 가지 경우는 특수한 경우에 대한 최적화이며, 일반적으로 사용되는 select 키워드는 runtime.selectgo 함수 호출로 변환됩니다. 처리 로직은 400 여 줄에 달합니다.
func selectgo(cas0 *scase, order0 *uint16, pc0 *uintptr, nsends, nrecvs int, block bool) (int, bool)컴파일러는 모든 case 문을 수집하여 scase 배열로 만든 후 selectgo 함수에 전달하며, 처리 완료 후 두 개의 반환값을 반환합니다.
- 첫 번째는 무작위로 선택된 채널 인덱스로, 어떤 채널이 처리되었는지를 나타내며, 없으면 -1 을 반환합니다.
- 두 번째는 채널 읽기 작업이 성공적으로 읽었는지 여부를 나타냅니다.
여기서 매개변수를 간단히 설명합니다.
cas0,scase배열의 헤드 포인터로, 전반부는 쓰기 채널 case 를 저장하고 후반부는 읽기 채널 case 를 저장하며,nsends로 구분합니다.order0, 길이는scase배열의 두 배로, 전반부는pollorder배열에 할당되고 후반부는lockorder배열에 할당됩니다.nsends와nrecvs는 읽기/쓰기 채널 case 의 수를 나타내며, 둘의 합이 case 의 총 수입니다.block은 블록 여부를 나타내며,defaultcase 가 있으면 논블록을 의미하고 값은false이며, 그렇지 않으면true입니다.pc0,[ncases]uintptr배열의 헤드를 가리키며, 경합 분석에 사용되며 나중에 무시할 수 있습니다. select 이해에는 도움이 되지 않습니다.
다음 코드가 있다고 가정합니다.
func main() {
ch := make(chan int)
select {
case ch <- 1:
println(1)
case ch <- 2:
println(2)
case ch <- 3:
println(3)
case ch <- 4:
println(4)
default:
println("default")
}
}어셈블리 형태를 확인하면 이해를 돕기 위해 일부 코드를 생략했습니다.
0x0000 00000 TEXT main.main(SB), ABIInterna
...
0x0023 00035 CALL runtime.makechan(SB)
0x0028 00040 MOVQ $1, main..autotmp_2+72(SP) // 1 2 3 4 몇 개의 임시 변수
0x0031 00049 MOVQ $2, main..autotmp_4+64(SP)
0x003a 00058 MOVQ $3, main..autotmp_6+56(SP)
0x0043 00067 MOVQ $4, main..autotmp_8+48(SP)
...
0x00c8 00200 CALL runtime.selectgo(SB) // runtime.selectgo 함수 호출
0x00cd 00205 TESTQ AX, AX
0x00d0 00208 JLT 352 // default 분기로 이동
0x00d6 00214 PCDATA $1, $-1
0x00d6 00214 JEQ 320 // 분기 4 로 이동
0x00d8 00216 CMPQ AX, $1
0x00dc 00220 JEQ 288 // 분기 3 으로 이동
0x00de 00222 NOP
0x00e0 00224 CMPQ AX, $2
0x00e4 00228 JNE 258 // 분기 2 로 이동
0x00e6 00230 PCDATA $1, $0
0x00e6 00230 CALL runtime.printlock(SB)
0x00eb 00235 MOVL $3, AX
0x00f0 00240 CALL runtime.printint(SB)
0x00f5 00245 CALL runtime.printnl(SB)
0x00fa 00250 CALL runtime.printunlock(SB)
0x00ff 00255 NOP
0x0100 00256 JMP 379
0x0102 00258 CALL runtime.printlock(SB)
0x0107 00263 MOVL $4, AX
0x010c 00268 CALL runtime.printint(SB)
0x0111 00273 CALL runtime.printnl(SB)
0x0116 00278 CALL runtime.printunlock(SB)
0x011b 00283 JMP 379
0x011d 00285 NOP
0x0120 00288 CALL runtime.printlock(SB)
0x0125 00293 MOVL $2, AX
0x012a 00298 CALL runtime.printint(SB)
0x012f 00303 CALL runtime.printnl(SB)
0x0134 00308 CALL runtime.printunlock(SB)
0x0139 00313 JMP 379
0x013b 00315 NOP
0x0140 00320 CALL runtime.printlock(SB)
0x0145 00325 MOVL $1, AX
0x014a 00330 CALL runtime.printint(SB)
0x014f 00335 CALL runtime.printnl(SB)
0x0154 00340 CALL runtime.printunlock(SB)
0x0159 00345 JMP 379
0x015b 00347 NOP
0x0160 00352 CALL runtime.printlock(SB)
0x0165 00357 LEAQ go:string."default\n"(SB)
0x016c 00364 MOVL $8, BX
0x0171 00369 CALL runtime.printstring(SB)
0x0176 00374 CALL runtime.printunlock(SB)
0x017b 00379 PCDATA $1, $-1
0x017b 00379 ADDQ $160, SP
0x0182 00386 POPQ BP
0x0183 00387 RETselectgo 함수 호출 후 판단 + 점프 로직이 존재하는 것을 볼 수 있습니다. 이를 통해 원래 모습을 추론할 수 있습니다.
casei, ok := runtime.selectgo()
if casei == -1 {
println("default")
} else if casei == 3 {
println(4)
} else if casei == 2 {
println(3)
} else if casei == 1 {
println(2)
} else {
println(1)
}컴파일러가 생성한 실제 코드는 이와 다를 수 있지만 대략적인 의미는 비슷합니다. 따라서 컴파일러는 selectgo 함수 호출 후 if 문을 사용하여 어떤 채널이 실행될지 판단하며, 호출 전에 컴파일러는 scase 배열을 수집하는 for 루프를 생성하지만 여기서는 생략했습니다.
selectgo 함수 사용 방법을 안 후, 이제 selectgo 함수 내부가 어떻게 작동하는지 알아보겠습니다. 먼저 몇 개의 배열을 초기화하며, nsends+nrecvs는 case 의 총 수를 나타냅니다. 아래 코드에서 case 수의 최댓값이 1 << 16임을 알 수 있습니다. pollorder는 채널 실행 순서를 결정하고, lockorder는 채널 잠금 순서를 결정합니다.
cas1 := (*[1 << 16]scase)(unsafe.Pointer(cas0))
// 길이는 scase 배열의 두 배로, 전반부는 pollorder 배열에, 후반부는 lockorder 배열에 할당됩니다.
order1 := (*[1 << 17]uint16)(unsafe.Pointer(order0))
ncases := nsends + nrecvs
scases := cas1[:ncases:ncases]
pollorder := order1[:ncases:ncases]
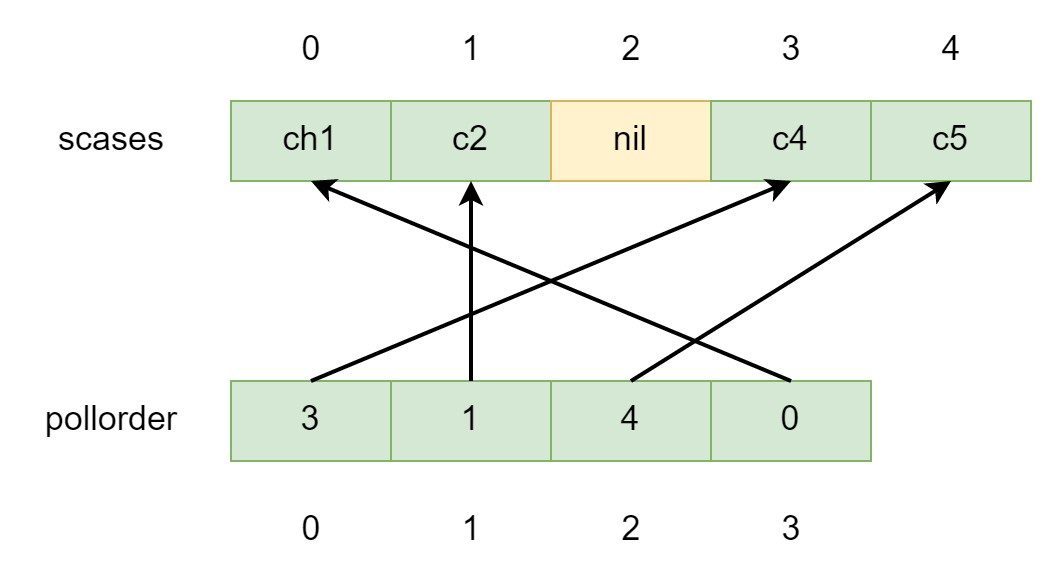
lockorder := order1[ncases:][:ncases:ncases]다음으로 pollorder 배열을 초기화하며, 대기 중인 채널의 sacses 배열 인덱스를 저장합니다.
norder := 0
for i := range scases {
cas := &scases[i]
// Omit cases without channels from the poll and lock orders.
if cas.c == nil {
cas.elem = nil // allow GC
continue
}
j := fastrandn(uint32(norder + 1))
pollorder[norder] = pollorder[j]
pollorder[j] = uint16(i)
norder++
}
pollorder = pollorder[:norder]
lockorder = lockorder[:norder]이는 전체 scases 배열을 순회하고, runtime.fastrandn을 통해 [0, i] 사이의 난수를 생성한 후 이를 i와 교환합니다. 과정에서 채널이 nil인 case 를 건너뛰며, 순회 완료 후 요소가 뒤섞인 pollorder 배열을 얻습니다.
그런 다음 pollorder 배열을 채널 주소 크기에 따라 힙 정렬하여 lockorder 배열을 얻고, runtime.sellock을 호출하여 순서대로 잠급니다.
func sellock(scases []scase, lockorder []uint16) {
var c *hchan
for _, o := range lockorder {
c0 := scases[o].c
if c0 != c {
c = c0
lock(&c.lock)
}
}
}여기서 주의할 점은 채널을 주소 크기로 정렬하는 것은 데드락을 방지하기 위함입니다. select 작업 자체는 잠금이 병렬성을 허용하지 않기 때문입니다. pollorder의 무작위 순서로 잠근다고 가정하고 다음 코드의 경우를 고려해 보십시오.
ch1 := make(chan int)
ch2 := make(chan int)
ch3 := make(chan int)
ch4 := make(chan int)
poll := func() {
select {
case ch1 <- 1:
println(1)
case ch2 <- 2:
println(2)
case ch3 <- 3:
println(3)
case ch4 <- 4:
println(4)
default:
println("default")
}
}
// A
go poll()
// B
go poll()
// C
go poll()세 고루틴 ABC 모두 잠금 단계에 도달했으며, 서로의 잠금 순서가 무작위로 서로 다를 수 있습니다. 다음과 같은 상황이 발생할 수 있습니다.
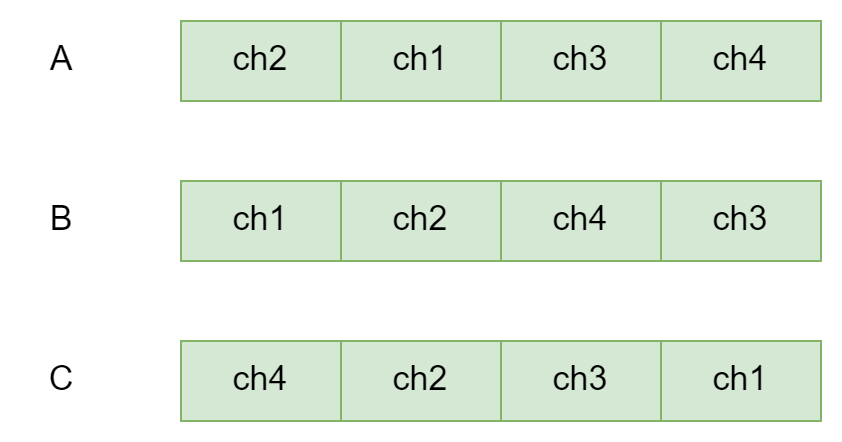
ABC 잠금 순서가 위 그림과 같다고 가정하면 데드락 가능성이 매우 큽니다. 예를 들어 A 는 먼저 ch2의 잠금을 持有하고 ch1의 잠금을 얻으려 하지만, ch1이 이미 고루틴 B 에 의해 잠겼다고 가정하면, 고루틴 B 는 ch2의 잠금을 얻으려 합니다. 이렇게 되면 데드락이 발생합니다.
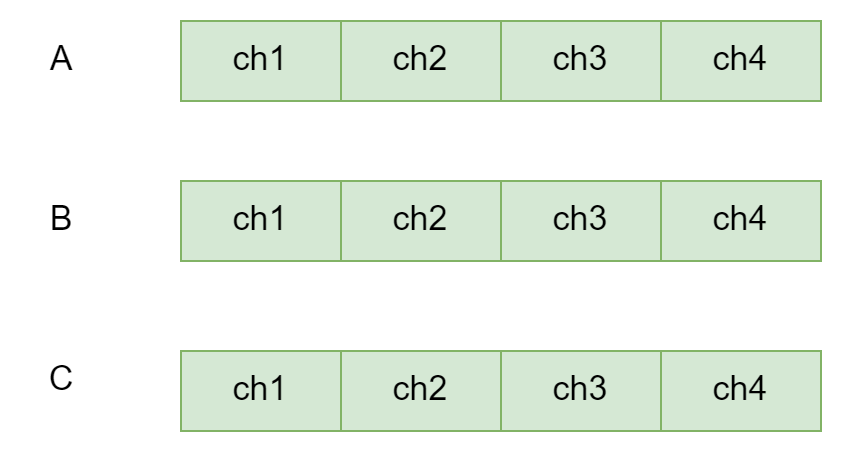
모든 고루틴이 동일한 순서로 잠금을 얻으면 데드락 문제가 발생하지 않습니다. 이것이 lockorder가 주소 크기로 정렬되는 근본적인 이유입니다.
잠근 후 실제 처리 단계가 시작됩니다. 먼저 pollorder 배열을 순회하여 이전에 섞인 순서로 채널에 액세스하고, 사용 가능한 채널을 찾을 때까지逐个 순회합니다.
for _, casei := range pollorder {
casi = int(casei)
cas = &scases[casi]
c = cas.c
if casi >= nsends { // 채널 읽기
sg = c.sendq.dequeue()
if sg != nil {
goto recv
}
if c.qcount > 0 {
goto bufrecv
}
if c.closed != 0 {
goto rclose
}
} else { // 채널 쓰기
if c.closed != 0 {
goto sclose
}
sg = c.recvq.dequeue()
if sg != nil {
goto send
}
if c.qcount < c.dataqsiz {
goto bufsend
}
}
}여기서 읽기/쓰기 채널에 대해 6 가지 경우의 처리를 했음을 볼 수 있습니다. 아래에서 각각 설명합니다. 첫 번째 경우, 읽기 채널이고 송신 측이 대기 중입니다. 여기서는 runtime.recv 함수로 이동하며, 그 역할은 이미 설명했습니다. 최종적으로 송신 측 고루틴을 깨우며, 깨우기 전 콜백 함수가 모든 채널 잠금을 해제합니다.
recv:
// can receive from sleeping sender (sg)
recv(c, sg, cas.elem, func() { selunlock(scases, lockorder) }, 2)
recvOK = true
goto retc두 번째 경우, 읽기 채널이고 송신 측이 대기 중이지 않으며, 버퍼 요소 수가 0 보다 큽니다. 여기서는 버퍼에서 직접 데이터를 읽으며, 로직은 runtime.chanrecv와 완전히 동일하며 잠금을 해제합니다.
bufrecv:
recvOK = true
qp = chanbuf(c, c.recvx)
if cas.elem != nil {
typedmemmove(c.elemtype, cas.elem, qp)
}
typedmemclr(c.elemtype, qp)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.qcount--
selunlock(scases, lockorder)
goto retc세 번째 경우, 읽기 채널이지만 채널이 이미 닫혔고 버퍼에 남은 요소가 없습니다. 여기서는 먼저 잠금을 해제하고 직접 반환합니다.
rclose:
selunlock(scases, lockorder)
recvOK = false
if cas.elem != nil {
typedmemclr(c.elemtype, cas.elem)
}
goto retc네 번째 경우, 닫힌 채널에 데이터를 보냅니다. 여기서는 먼저 잠금을 해제하고 panic합니다.
sclose:
selunlock(scases, lockorder)
panic(plainError("send on closed channel"))다섯 번째 경우, 수신 측이 블록 대기 중입니다. 여기서는 runitme.send 함수를 호출하며, 최종적으로 수신 측 고루틴을 깨우고, 깨우기 전 콜백 함수가 모든 채널 잠금을 해제합니다.
send:
send(c, sg, cas.elem, func() { selunlock(scases, lockorder) }, 2)
goto retc여섯 번째 경우, 수신 측 고루틴이 대기하지 않으며, 보낼 데이터를 버퍼에 넣은 후 잠금을 해제합니다.
bufsend:
typedmemmove(c.elemtype, chanbuf(c, c.sendx), cas.elem)
c.sendx++
if c.sendx == c.dataqsiz {
c.sendx = 0
}
c.qcount++
selunlock(scases, lockorder)
goto retc그런 다음 위의 모든 경우는 마지막으로 retc 분기로 이동하며, 여기서 수행할 일은 선택된 채널 인덱스 casi와 읽기 성공 여부를 나타내는 recvOk를 반환하는 것뿐입니다.
retc:
return casi, recvOK일곱 번째 경우, 사용 가능한 채널을 찾지 못했고 코드에 default 분기가 포함되어 있으면 채널 잠금을 해제하고 직접 반환합니다. 여기서 반환되는 casi는 -1 로, 사용 가능한 채널이 없음을 나타냅니다.
if !block {
selunlock(scases, lockorder)
casi = -1
goto retc
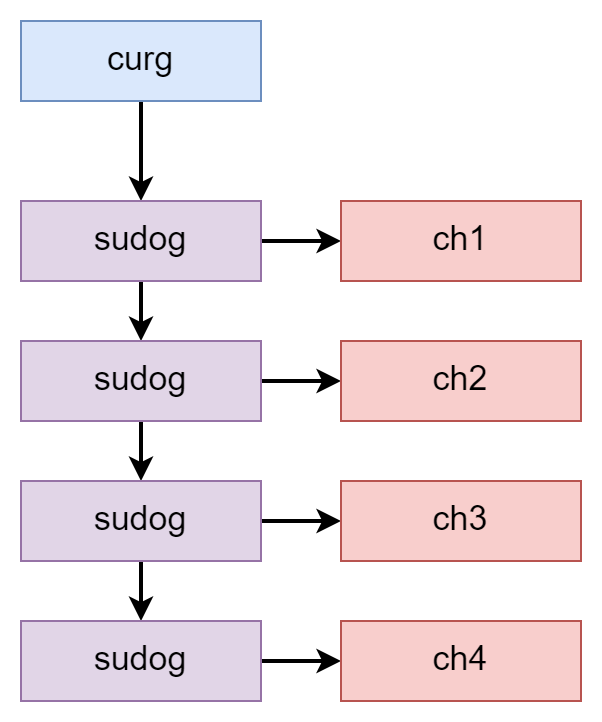
}마지막 경우, 사용 가능한 채널을 찾지 못했고 코드에 default 분기가 포함되어 있지 않으면 현재 고루틴이 블록 상태에 빠집니다. 그 전 selectgo는 현재 고루틴을 모든 모니터링 채널의 recvq/sendq 큐에 추가합니다.
gp = getg()
nextp = &gp.waiting
for _, casei := range lockorder {
casi = int(casei)
cas = &scases[casi]
c = cas.c
sg := acquireSudog()
sg.g = gp
sg.isSelect = true
sg.elem = cas.elem
sg.releasetime = 0
sg.c = c
*nextp = sg
nextp = &sg.waitlink
if casi < nsends {
c.sendq.enqueue(sg)
} else {
c.recvq.enqueue(sg)
}
}여기서는 여러 sudog를 생성하고 해당 채널과 연결합니다.
그런 다음 runtime.gopark을 통해 블록되며, 블록 전 runtime.selparkcommit 함수가 채널 잠금을 해제합니다. 이는 콜백 함수로 gopark에 전달됩니다.
gp.param = nil
// Signal to anyone trying to shrink our stack that we're about
// to park on a channel. The window between when this G's status
// changes and when we set gp.activeStackChans is not safe for
// stack shrinking.
gp.parkingOnChan.Store(true)
gopark(selparkcommit, nil, waitReasonSelect, traceBlockSelect, 1)
gp.activeStackChans = false깨어난 후 첫 번째 일은 sudog와 채널의 연결을 해제하는 것입니다.
sellock(scases, lockorder)
gp.selectDone.Store(0)
sg = (*sudog)(gp.param)
gp.param = nil
casi = -1
cas = nil
caseSuccess = false
sglist = gp.waiting
// Clear all elem before unlinking from gp.waiting.
for sg1 := gp.waiting; sg1 != nil; sg1 = sg1.waitlink {
sg1.isSelect = false
sg1.elem = nil
sg1.c = nil
}
gp.waiting = nil그런 다음 sudog를 이전 채널의 대기 큐에서 제거합니다.
for _, casei := range lockorder {
k = &scases[casei]
if sg == sglist {
// sg has already been dequeued by the G that woke us up.
casi = int(casei)
cas = k
caseSuccess = sglist.success
if sglist.releasetime > 0 {
caseReleaseTime = sglist.releasetime
}
} else {
c = k.c
if int(casei) < nsends {
c.sendq.dequeueSudoG(sglist)
} else {
c.recvq.dequeueSudoG(sglist)
}
}
sgnext = sglist.waitlink
sglist.waitlink = nil
releaseSudog(sglist)
sglist = sgnext
}위의 과정에서 반드시 깨운 측 고루틴이 처리한 채널을 찾으며, caseSuccess에 따라 마지막 처리를 합니다. 쓰기 작업의 경우 sg.success가 false이면 채널이 이미 닫혔음을 의미하며, go 런타임 전체에서 close 함수만 이 필드를 false로 설정합니다. 이는 현재 고루틴이 깨운 측이 close 함수를 통해 깨웠음을 나타냅니다. 읽기 작업의 경우, 송신 측에 의해 깨어난 경우 데이터 읽기 작업도 깨어나기 전 송신 측이 runtime.send 함수를 통해 완료했으며, 그 값은 true입니다. close 함수에 의해 깨어난 경우, 앞과 마찬가지로 직접 반환합니다.
c = cas.c
if casi < nsends {
if !caseSuccess {
goto sclose
}
} else {
recvOK = caseSuccess
}
selunlock(scases, lockorder)
goto retc이로써 전체 select 로직이 대략 정리되었습니다. 위에서 여러 경우를 나누어 보았듯이 select 처리는 상당히 복잡합니다.