gc
Le travail du ramasse-miettes est de libérer la mémoire des objets qui ne sont plus utilisés, pour libérer de l'espace pour d'autres objets. Cette simple description cache une implémentation très complexe. L'histoire du ramasse-miettes remonte à plusieurs décennies, le langage Lisp des années 60 a été le premier à adopter un mécanisme de ramasse-miettes. Python et Objective-C utilisent principalement le comptage de références, Java et C# adoptent le ramasse-miettes générationnel. Aujourd'hui, en termes d'algorithmes de récupération, on peut大致 diviser en plusieurs catégories :
- Comptage de références : chaque objet enregistre combien de fois il est référencé, quand le compteur atteint 0, il est récupéré
- Marquage-balayage : les objets actifs sont marqués, les objets non marqués sont récupérés
- Algorithme de copie : les objets actifs sont copiés dans une nouvelle mémoire, tous les objets de l'ancienne mémoire sont récupérés
- Marquage-compression : version améliorée du marquage-balayage, lors de la récupération les objets actifs sont déplacés vers le début du tas, facilitant la gestion
En termes de mode d'application, on peut diviser en :
- Récupération globale : récupère tous les objets en une seule fois
- Récupération générationnelle : divise les objets en différentes générations selon leur temps de survie, puis utilise différents algorithmes
- Récupération incrémentale : effectue une récupération partielle à chaque fois
TIP
Consultez The Journey of Go's Garbage Collector pour en savoir plus sur l'histoire du ramasse-miettes Go.
À sa sortie, le mécanisme de ramasse-miettes de Go était très rudimentaire, avec seulement un simple algorithme de marquage-balayage. Le STW (Stop The World,暂停整个程序 pour le ramasse-miettes) pouvait durer plusieurs secondes ou plus. L'équipe Go a commencé à améliorer l'algorithme. Entre go1.0 et go1.8, ils ont essayé plusieurs approches :
- GC de copie concurrent avec barrière de lecture : les coûts de la barrière de lecture sont incertains, cette approche a été abandonnée
- Collecteur orienté requête (ROC) : nécessite d'activer la barrière d'écriture en permanence, ralentit l'exécution
- Récupération générationnelle : peu efficace en Go car le compilateur tend à allouer les nouveaux objets sur la pile, les objets de longue durée sur le tas
- Marquage de cartes sans barrière d'écriture : remplace le coût de la barrière par un hachage, nécessite un support matériel
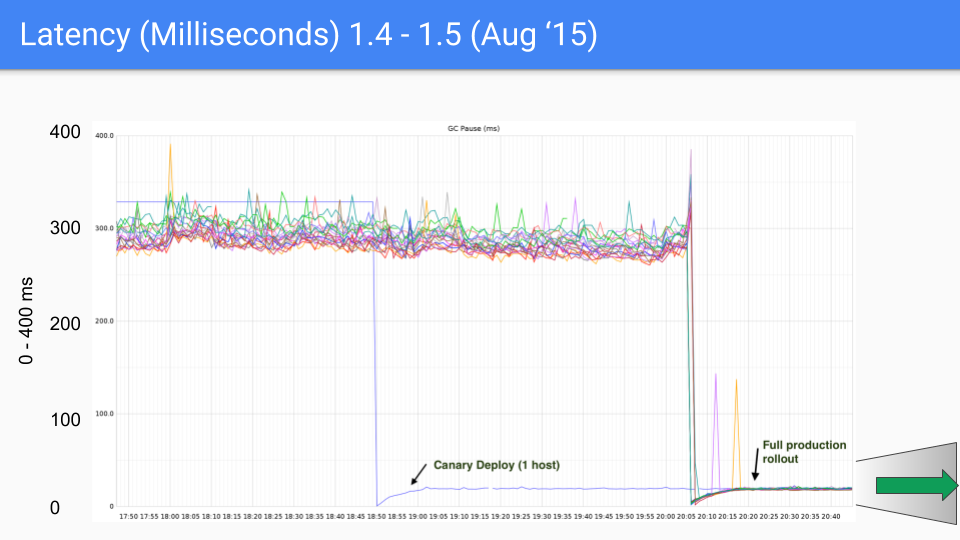
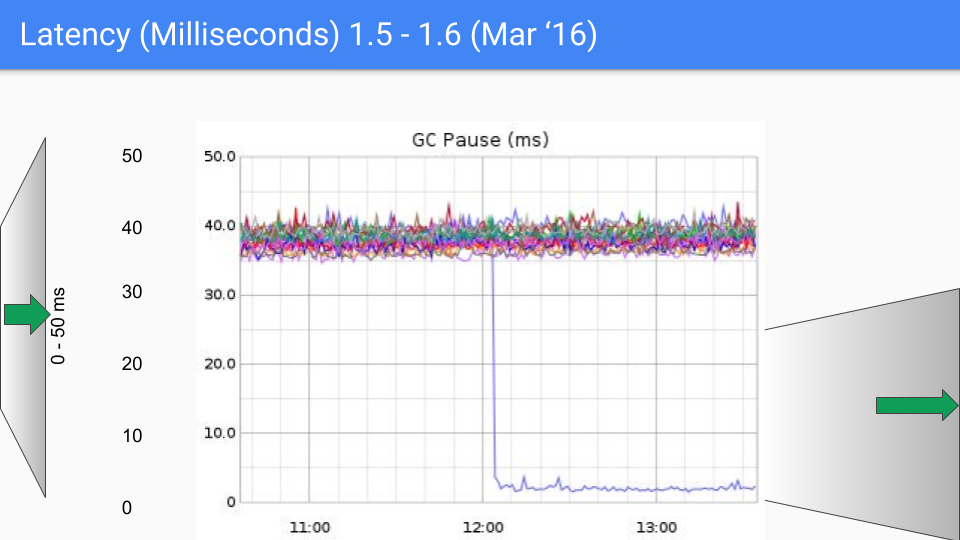
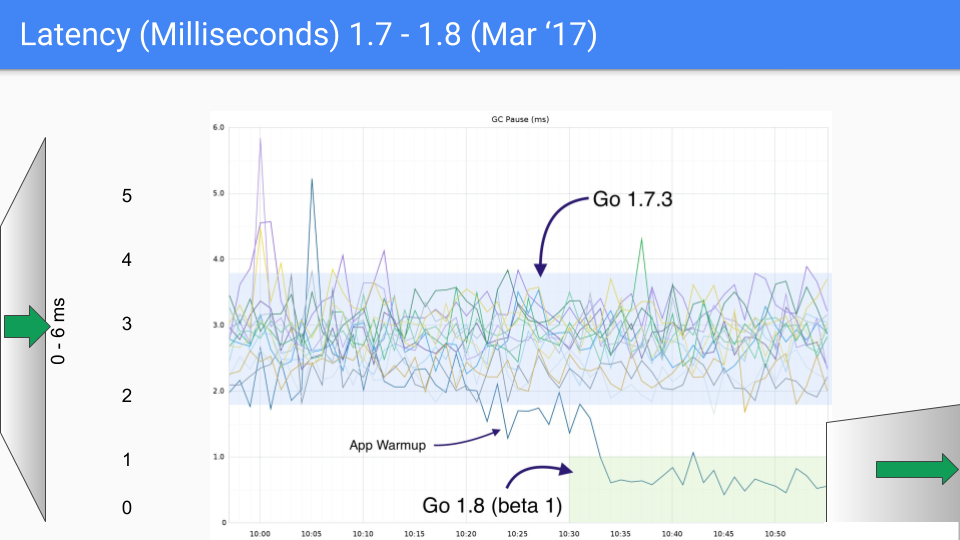
Finalement, l'équipe Go a choisi la combinaison marquage tricolore concurrent + barrière d'écriture, constamment améliorée dans les versions suivantes. Les images ci-dessous montrent l'évolution de la latence GC de go1.4 à go1.9.
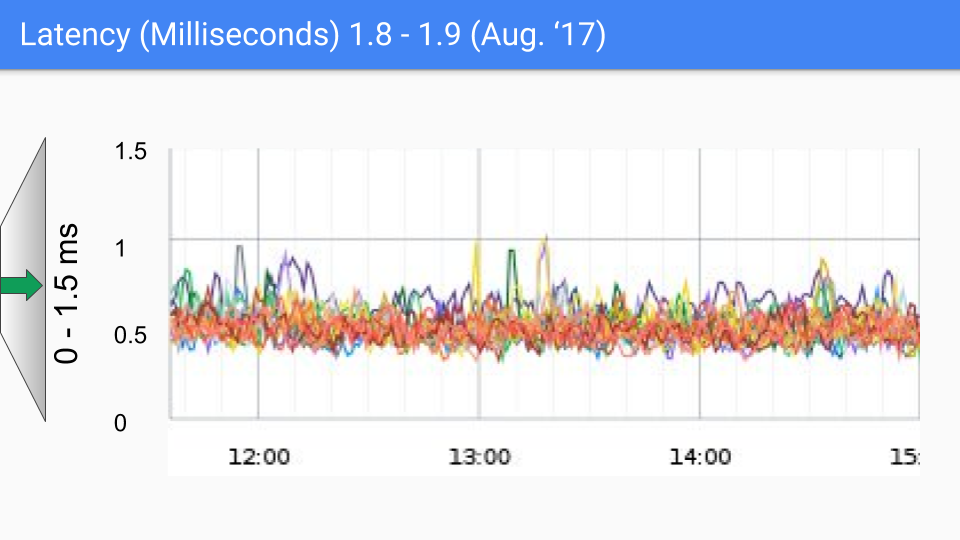
Au moment d'écrire cet article, la dernière version de Go approche go1.23. Pour Go aujourd'hui, la performance GC n'est plus un problème. La latence GC est maintenant inférieure à 100 microsecondes dans la plupart des cas, satisfaisant la grande majorité des scénarios métier.
En résumé, le ramasse-miettes Go se divise en plusieurs phases :
- Phase de balayage : collecte les objets racines depuis la pile et les variables globales
- Phase de marquage : colorie les objets
- Phase de terminaison du marquage : gère le nettoyage, désactive les barrières
- Phase de récupération : libère et récupère la mémoire des objets poubelles
Concepts
Dans la documentation officielle et les articles, vous pouvez rencontrer les concepts suivants :
- Mutateur : expression technique désignant le programme utilisateur, en Go cela refers au code utilisateur
- Collecteur : désigne le programme responsable du ramasse-miettes, en Go c'est le runtime
- Finalizer : désigne le code responsable de la récupération et libération de la mémoire des objets après le marquage
- Contrôleur : désigne la variable globale
runtime.gcController, de typegcControllerState, qui implémente l'algorithme de pacing - Limiteur : désigne
runtime.gcCPULimiter, responsable d'éviter que l'utilisation CPU soit trop élevée pendant le ramasse-miettes
Déclenchement
func gcStart(trigger gcTrigger)Le ramasse-miettes est lancé par la fonction runtime.gcStart, qui prend un paramètre runtime.gcTrigger contenant la raison du déclenchement GC, l'heure actuelle, et le numéro du cycle GC.
type gcTrigger struct {
kind gcTriggerKind
now int64 // gcTriggerTime: current time
n uint32 // gcTriggerCycle: cycle number to start
}Les valeurs possibles de gcTriggerKind sont :
const (
// gcTriggerHeap indicates that a cycle should be started when
// the heap size reaches the trigger heap size computed by the
// controller.
gcTriggerHeap gcTriggerKind = iota
// gcTriggerTime indicates that a cycle should be started when
// it's been more than forcegcperiod nanoseconds since the
// previous GC cycle.
gcTriggerTime
// gcTriggerCycle indicates that a cycle should be started if
// we have not yet started cycle number gcTrigger.n (relative
// to work.cycles).
gcTriggerCycle
)Il y a trois moments de déclenchement du ramasse-miettes :
Lors de la création d'un nouvel objet : lors de l'appel à
runtime.mallocgcpour allouer de la mémoire, si la mémoire tas atteint le seuil (généralement le double du dernier GC, ajusté par l'algorithme de pacing), le GC est déclenchégofunc mallocgc(size uintptr, typ *_type, needzero bool) unsafe.Pointer { ... if shouldhelpgc { if t := (gcTrigger{kind: gcTriggerHeap}); t.test() { gcStart(t) } } ... }Déclenchement forcé temporisé : Go lance une goroutine séparée pour exécuter
runtime.forcegchelper. Si aucun GC n'a eu lieu pendant longtemps, il force le déclenchement. Cette durée est définie parruntime.forcegcperiod, soit 2 minutesgofunc forcegchelper() { for { ... gcStart(gcTrigger{kind: gcTriggerTime, now: nanotime()}) ... } }gofunc sysmon() { ... for { ... // check if we need to force a GC if t := (gcTrigger{kind: gcTriggerTime, now: now}); t.test() && forcegc.idle.Load() { lock(&forcegc.lock) forcegc.idle.Store(false) var list gList list.push(forcegc.g) injectglist(&list) unlock(&forcegc.lock) } } }Déclenchement manuel : via la fonction
runtime.GC, l'utilisateur peut déclencher manuellement le ramasse-miettesgofunc GC() { ... n := work.cycles.Load() gcStart(gcTrigger{kind: gcTriggerCycle, n: n + 1}) ... }
TIP
Pour en savoir plus, consultez Go Gc Pacer Re-Design qui explique la conception et les améliorations de l'algorithme de pacing.
Marquage
L'algorithme GC de Go suit toujours l'étape marquage puis balayage, mais son implémentation est plus complexe qu'avant.
Marquage-Balayage
Commençons par l'algorithme de marquage-balayage le plus simple. En mémoire, les relations de référence entre objets forment un graphe. Le ramasse-miettes travaille sur ce graphe en deux phases :
- Phase de marquage : depuis les nœuds racines (variables sur la pile, variables globales, objets actifs), parcourt chaque nœud accessible et le marque comme actif
- Phase de balayage : parcourt tous les objets du tas, récupère les objets non marqués
Pendant la récupération, la structure du graphe d'objets ne peut pas changer, donc tout le programme doit être arrêté (STW). Après la récupération, le programme reprend. Les inconvénients de cet algorithme sont :
- Produit des fragments mémoire (moins problématique avec la gestion mémoire style TCMalloc de Go)
- Scanne tous les objets du tas pendant le marquage
- Provoque un STW qui暂停整个程序 pendant un temps non négligeable
Marquage Tricolore
Pour améliorer l'efficacité, Go adopte l'algorithme classique de marquage tricolore. Les trois couleurs sont :
- Noir : objet déjà visité pendant le marquage, et tous ses objets directement référencés ont été visités, représente un objet actif
- Gris : objet déjà visité pendant le marquage, mais ses objets directement référencés n'ont pas tous été visités, devient noir quand tous sont visités
- Blanc : jamais visité pendant le marquage, devient gris après visite, représente potentiellement un objet poubelle
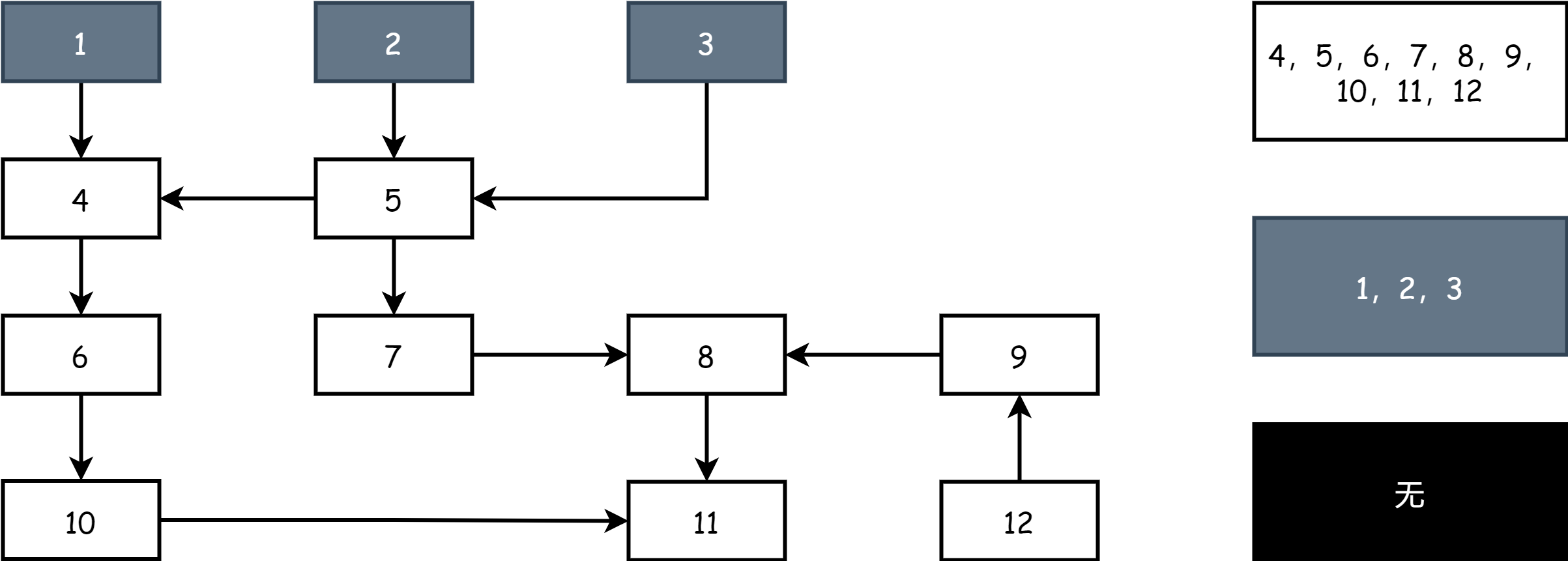
Au début du marquage tricolore, il n'y a que des objets gris et blancs. Tous les objets racines sont gris, les autres sont blancs.
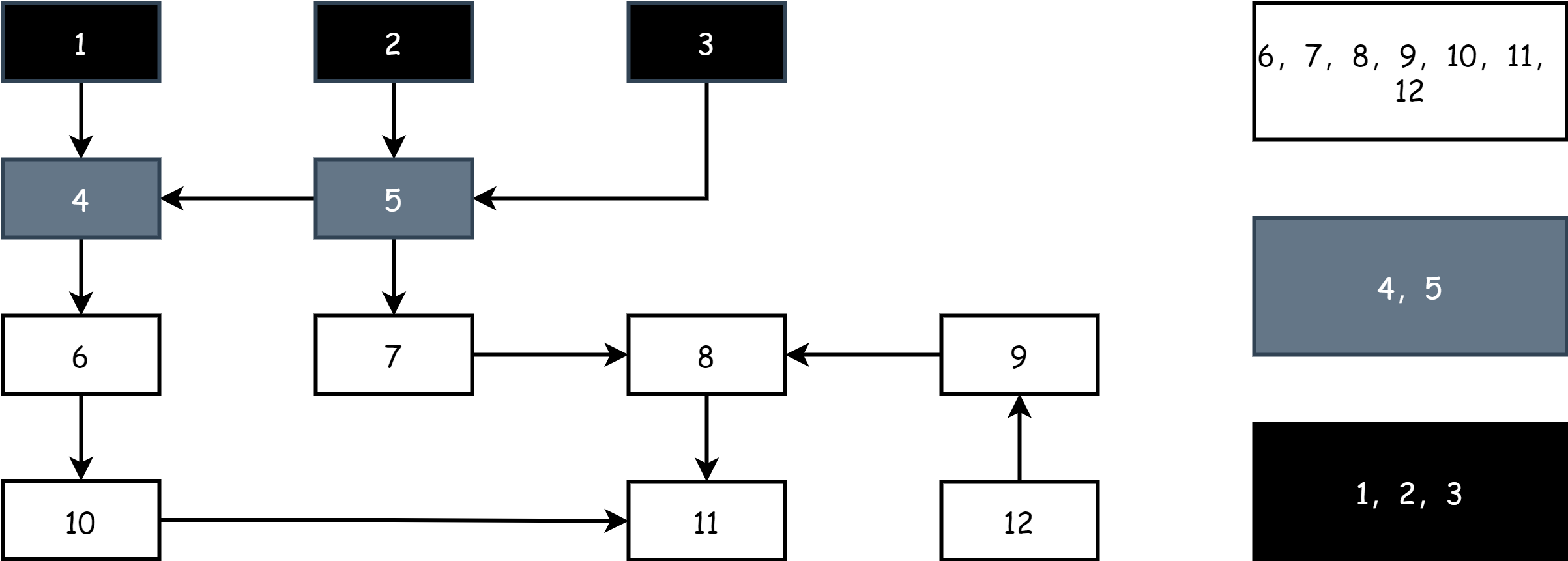
À chaque tour de marquage, on commence par les objets gris, les marque en noir (objets actifs), puis marque tous les objets directement référencés par l'objet noir en gris. Le reste est blanc.
On répète jusqu'à ce qu'il ne reste que des objets noirs et blancs. Quand l'ensemble des objets gris est vide, le marquage est terminé.
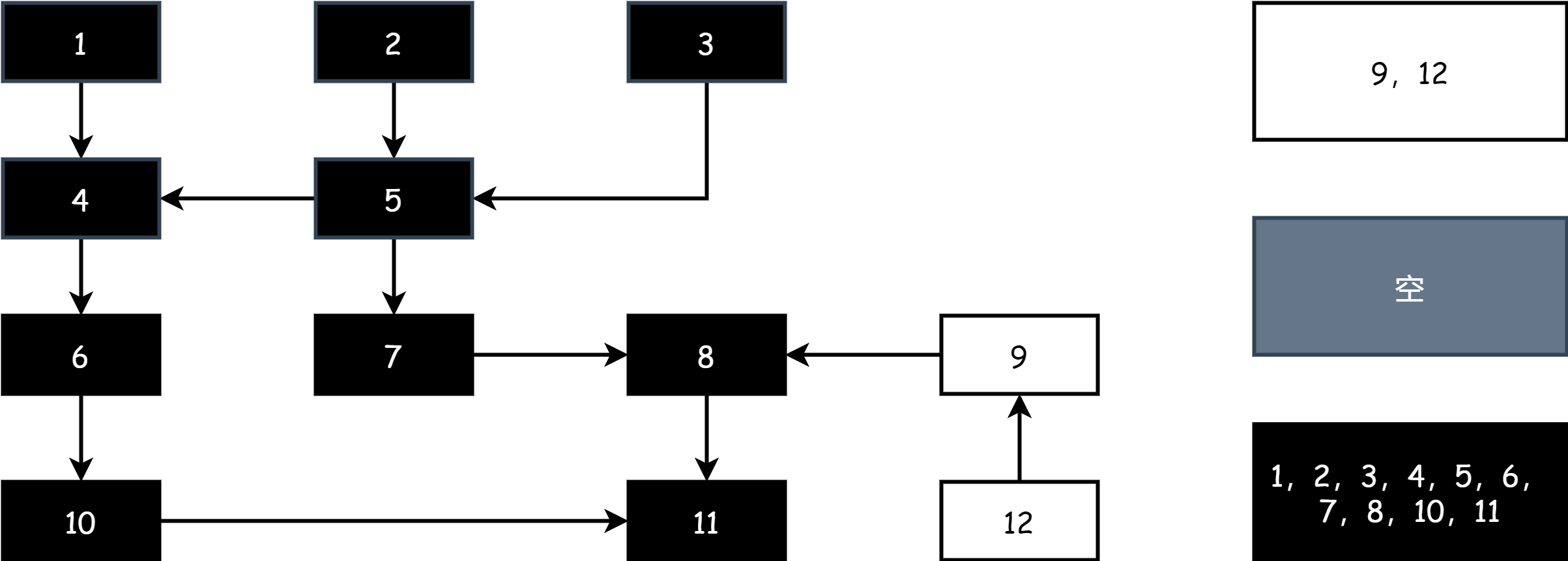
Après le marquage, dans la phase de balayage, il suffit de libérer la mémoire des objets blancs.
Invariance
Le marquage tricolore lui-même ne permet pas le marquage concurrent. Si la structure du graphe d'objets change pendant le marquage, deux situations peuvent se produire :
- Sur-marquage : un objet marqué noir voit toutes ses références supprimées par le programme utilisateur, il devrait être blanc et être récupéré
- Sous-marquage : un objet marqué blanc voit un autre objet le référencer, il devrait être noir et ne pas être récupéré
Le premier cas est acceptable car l'objet non récupéré sera traité dans le prochain cycle. Mais le second cas est inacceptable : libérer par erreur la mémoire d'un objet en cours d'utilisation provoquerait de graves erreurs.
L'invariance tricolore vient du papier de Pekka P. Pirinen de 1998 « Barrier techniques for incremental tracing ». Elle définit deux invariantes pour le marquage concurrent :
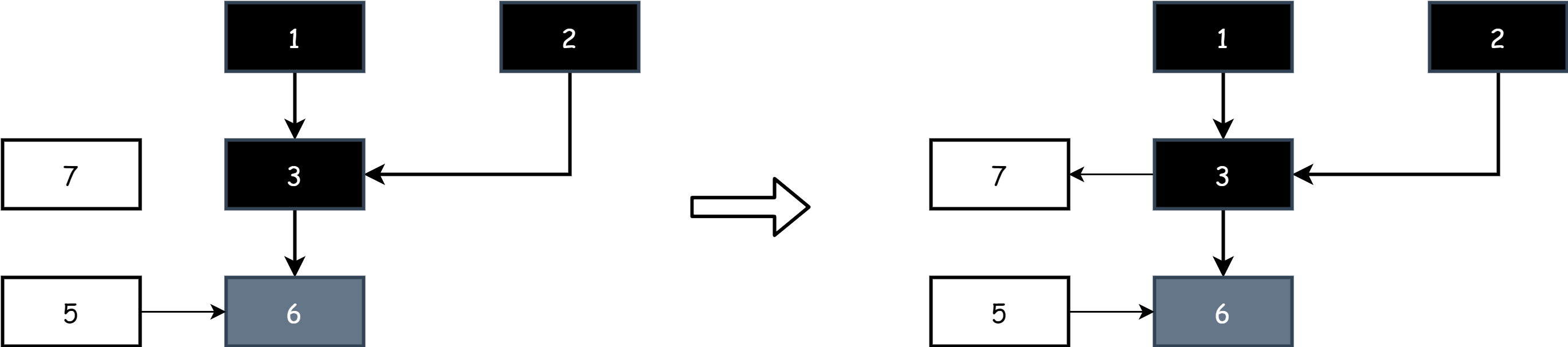
- Invariance tricolore forte : un objet noir ne peut pas directement référencer un objet blanc
- Invariance tricolore faible : quand un objet noir référence directement un objet blanc, il doit y avoir un objet gris qui peut accéder directement ou indirectement à cet objet blanc
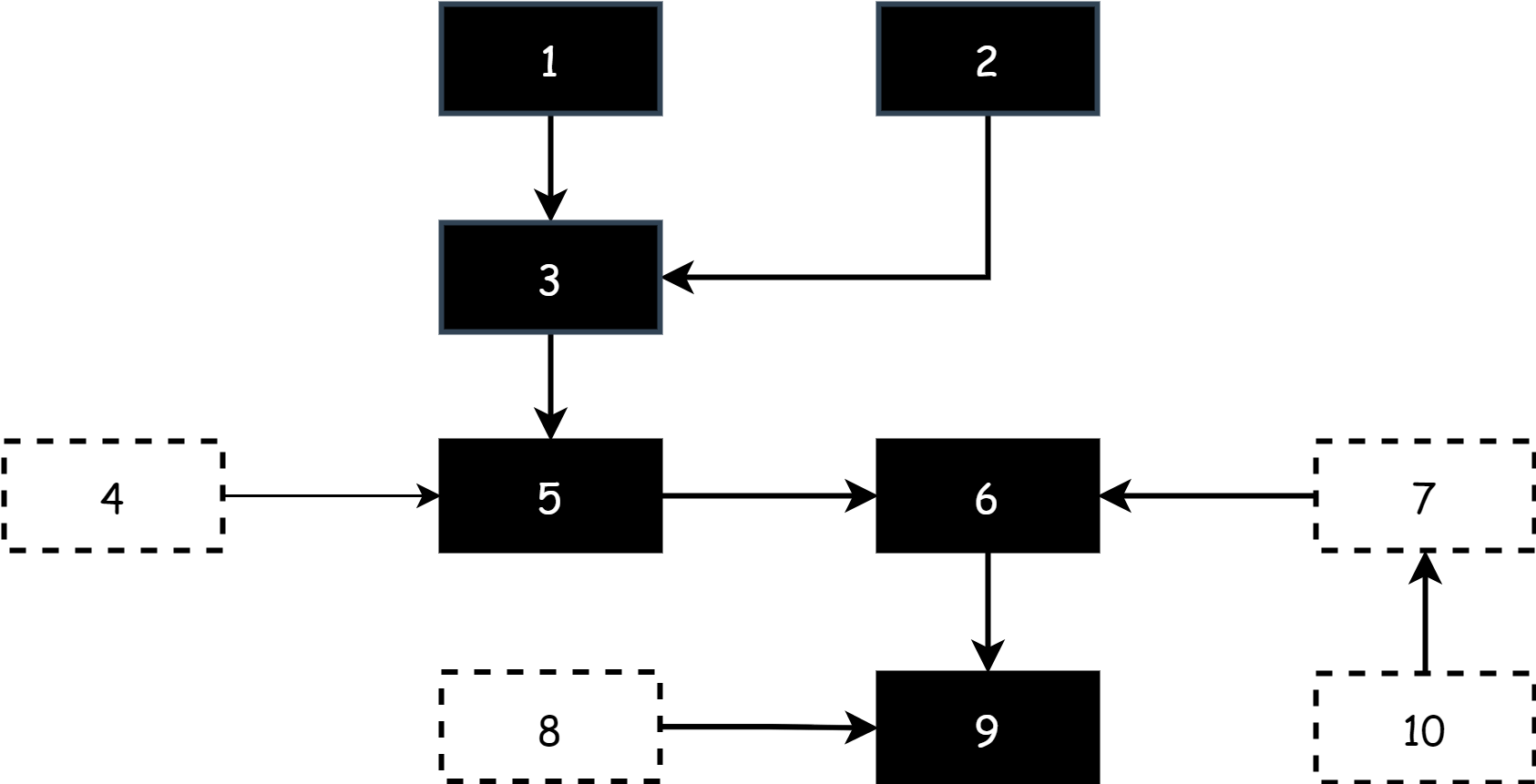
Pour l'invariance forte, l'objet noir 3 est déjà visité et ses enfants sont marqués gris. Si le programme utilisateur ajoute une nouvelle référence à l'objet blanc 7 depuis l'objet noir 3, normalement l'objet 7 devrait être marqué gris. Mais comme l'objet 3 est déjà visité, l'objet 7 ne sera pas visité et restera blanc, pour être finalement libéré par erreur.
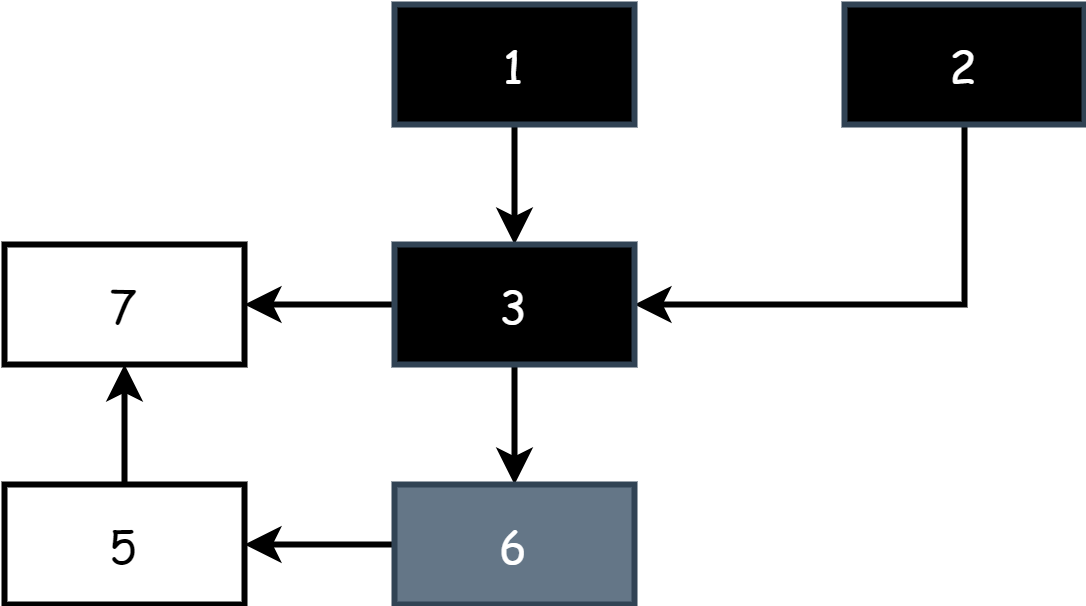
Pour l'invariance faible, c'est similaire. Comme l'objet gris peut accéder directement ou indirectement à l'objet blanc, il sera finalement marqué gris lors du marquage, évitant la libération par erreur.
Grâce à l'invariance, on s'assure qu'aucun objet n'est libéré par erreur pendant le marquage, garantissant la correction du marquage concurrent. La clé pour garantir l'invariance tricolore en concurrent est la technologie de barrière.
Travail de marquage
Pendant la phase de balayage GC, une variable globale runtime.gcphase indique l'état du GC :
_GCoff: marquage non commencé_GCmark: marquage commencé_GCmarktermination: marquage va se terminer
Quand le marquage commence, l'état est _GCmark. Le travail de marquage est exécuté par la fonction runtime.gcDrain, avec un paramètre runtime.gcWork qui est un pool de tampons contenant les pointeurs d'objets à suivre.
func gcDrain(gcw *gcWork, flags gcDrainFlags)Elle tente d'obtenir des pointeurs à suivre depuis le pool, et appelle runtime.scanobject pour continuer le balayage, qui scanne les objets du tampon et les colore en noir.
if work.full == 0 {
gcw.balance()
}
b := gcw.tryGetFast()
if b == 0 {
b = gcw.tryGet()
if b == 0 {
// Flush the write barrier
// buffer; this may create
// more work.
wbBufFlush()
b = gcw.tryGet()
}
}
if b == 0 {
// Unable to get work.
break
}
scanobject(b, gcw)Le balayage s'arrête quand P est préempté ou qu'un STW se produit.
for !(gp.preempt && (preemptible || sched.gcwaiting.Load() || pp.runSafePointFn != 0)) {
...
scanobject(b, gcw)
...
}runtime.gcwork est une file producteur/consommateur qui stocke les objets gris à scanner. Chaque processeur P a une telle file locale, correspondant au champ runtime.p.gcw.
func scanobject(b uintptr, gcw *gcWork) {
...
for {
var addr uintptr
if hbits, addr = hbits.nextFast(); addr == 0 {
if hbits, addr = hbits.next(); addr == 0 {
break
}
}
scanSize = addr - b + goarch.PtrSize
obj := *(*uintptr)(unsafe.Pointer(addr))
if obj != 0 && obj-b >= n {
if obj, span, objIndex := findObject(obj, b, addr-b); obj != 0 {
greyobject(obj, b, addr-b, span, gcw, objIndex)
}
}
}
gcw.bytesMarked += uint64(n)
gcw.heapScanWork += int64(scanSize)
}La fonction runtime.scanobject marque les objets blancs accessibles en gris et les met dans la file locale via gcw.put. gcDrain tente d'obtenir des objets gris via gcw.tryget pour continuer le balayage. Le processus de marquage est incrémental, pas besoin de tout faire en une fois.